


停車誘導(dǎo)系統(tǒng)
停車誘導(dǎo)系統(tǒng)

隨著社會(huì)經(jīng)濟(jì)的發(fā)展,人們生活水平的提高,汽車已越來越多的進(jìn)入家庭,汽車消費(fèi)時(shí)代已悄然來臨。隨著車輛的增加,城市里停車位的缺口越來越大,就需要停車場(chǎng)的建設(shè)跟得上,對(duì)于重要公共場(chǎng)所,停車場(chǎng)作為重要的配套設(shè)施,直接影響它的服務(wù)品質(zhì)和定位檔次,以及營(yíng)業(yè)收入的多少。
為了提高停車場(chǎng)的服務(wù)水平,停車場(chǎng)智能管理系統(tǒng)是必不可少的。它已經(jīng)在大部分停車場(chǎng)發(fā)揮著重要作用,在為人們停車帶來方便的同時(shí)也具有良好的社會(huì)效益和經(jīng)濟(jì)效益。
建立一套智能化的停車場(chǎng)收費(fèi)管理和引導(dǎo)系統(tǒng),使停車服務(wù)做到安全、簡(jiǎn)便、準(zhǔn)確,并且使造價(jià)和經(jīng)營(yíng)成本控制在適當(dāng)范圍,是當(dāng)前停車場(chǎng)管理的趨勢(shì)。在提高效率的同時(shí)更能解決人工管理的一切弊端,是停車場(chǎng)管理的理想模式。
濟(jì)南東陸智能科技有限公司作為一家專業(yè)從事停車場(chǎng)管理的廠家,堅(jiān)持與時(shí)俱進(jìn),不斷創(chuàng)新,開發(fā)出一整套智能化停車場(chǎng)收費(fèi)和引導(dǎo)系統(tǒng),在實(shí)際應(yīng)用中,得到廣大用戶的認(rèn)可。
我公司停車場(chǎng)智能車位引導(dǎo)系統(tǒng)采用成熟且符合國(guó)際衛(wèi)生標(biāo)準(zhǔn)的超聲波車位探測(cè)技術(shù)、LED動(dòng)態(tài)顯示技術(shù)、計(jì)算機(jī)通訊技術(shù)、微電腦實(shí)時(shí)控制等高新科技,通過對(duì)車位使用情況及進(jìn)出車輛的檢測(cè),了解車位的使用情況和停車場(chǎng)內(nèi)的車輛數(shù)量,實(shí)時(shí)發(fā)布車位信息到城市道路和入口及交叉路口的引導(dǎo)屏上,從而引導(dǎo)駕車人士方便快捷的找到空車位。
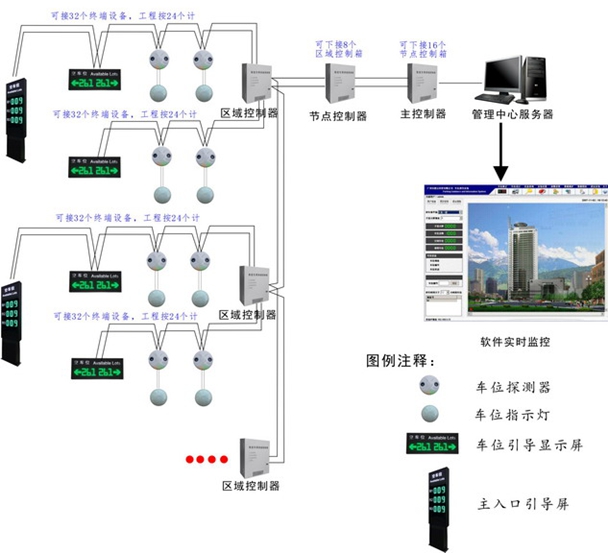
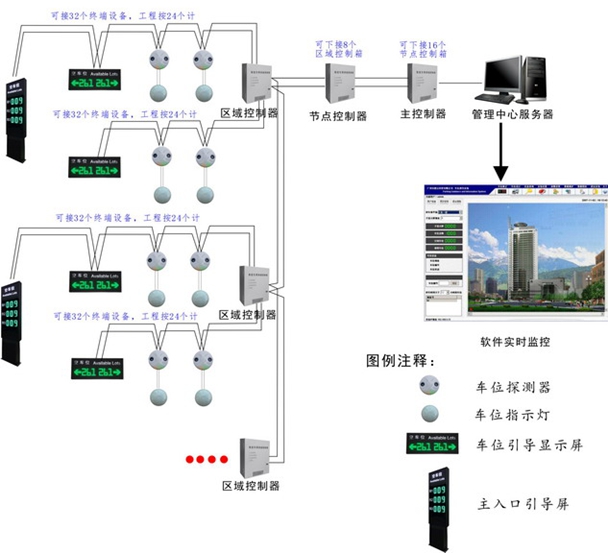
車位引導(dǎo)系統(tǒng)主要由:車流量檢測(cè)系統(tǒng)、車位探測(cè)系統(tǒng)、信息顯示系統(tǒng)、控制系統(tǒng)、引導(dǎo)系統(tǒng)管理軟件幾大部分組成。
一、車流量檢測(cè)系統(tǒng)

在停車場(chǎng)車位引導(dǎo)等相關(guān)系統(tǒng)中,通道的車流量是需要檢測(cè)的重要數(shù)據(jù)。常見的車流量檢測(cè)方式有地感線圈模式、紅外對(duì)射模式等,以及性能更具優(yōu)勢(shì)的“超聲陣列模式”。
安裝施工簡(jiǎn)便,安全可靠,無(wú)需破壞地面。可直接接入?yún)^(qū)域控制器。
與常見的地感線圈模式相比,該超聲陣列流量檢測(cè)器系列不死機(jī)、檢測(cè)靈敏、自帶方向性判別、可防止跟車太近引致的誤檢、能避免手推車等小型金屬引起的干擾誤檢等,其卓越的性能為車輛檢測(cè)提供了一種可靠地選擇。
二、車位探測(cè)系統(tǒng)
車位探測(cè)系統(tǒng)屬于整個(gè)車位引導(dǎo)系統(tǒng)的信息采集部分,檢測(cè)停車場(chǎng)內(nèi)車位上是否有車輛,將檢測(cè)到的結(jié)果用車位指示燈分色顯示,同時(shí)傳送給上層控制器。各車位狀態(tài)通過系統(tǒng)運(yùn)算處理,在電子地圖顯示車場(chǎng)車位動(dòng)態(tài),在引導(dǎo)顯示屏提示各方向可用車位數(shù),達(dá)到停車引導(dǎo)的目的。
按其檢測(cè)原理不同分為前置式超聲波車位探測(cè)器、無(wú)線超聲波車位探測(cè)器、圖像識(shí)別車位探測(cè)器、磁電車位探測(cè)器、多模組合車位探測(cè)器。
三、信息顯示系統(tǒng)
車位顯示屏是車位引導(dǎo)系統(tǒng)中的信息發(fā)布模塊,能夠在入口處及場(chǎng)內(nèi)通道交叉處,及時(shí)的將系統(tǒng)發(fā)布的空車位信息顯示出來,從而給予車主直觀的引導(dǎo)提示,迅速分流車輛,避免誤入無(wú)車位區(qū)域浪費(fèi)時(shí)間以及產(chǎn)生擁堵,最大效率的利用停車場(chǎng)車位資源。
車位顯示屏有掛式引導(dǎo)屏和落地式主入口引導(dǎo)屏兩種。
四、控制系統(tǒng)
控制系統(tǒng)是整個(gè)車位引導(dǎo)系統(tǒng)的核心部分,對(duì)整個(gè)系統(tǒng)進(jìn)行管理控制,有車位引導(dǎo)控制箱和流量控制箱。
五、引導(dǎo)系統(tǒng)管理軟件
自主研發(fā)管理軟件,通過軟件系統(tǒng)實(shí)時(shí)監(jiān)控整個(gè)車位引導(dǎo)系統(tǒng)。
上一個(gè):
云+停車視頻誘導(dǎo)
下一個(gè):
沒有了

聯(lián)系電話 0531-82312801 82312805 公司地址:濟(jì)南市歷下區(qū)奧體西路力高國(guó)際10號(hào)樓25層 |
|

濟(jì)南東陸智能科技有限公司 版權(quán)所有 Copyright?2019 魯ICP備09031158號(hào)-1 All rights reserved